

En octubre del año pasado, el módulo Schiaparelli de la misión ExoMars de la ESA no consiguió aterrizar con éxito en Marte. Después de la pertinente investigación, las razones por las que esto no fue posible han sido recogidas por la ESA en un informe que ha sido publicado hace un par de semanas.
Antes de entrar en las conclusiones presentadas en el informe, creo que es interesante aprovechar la oportunidad para explicar cómo estaba planeada la entrada, el descenso y el aterrizaje en Marte del módulo Schiaparelli, y cómo se sucedieron los hechos durante el vuelo.
La fase de entrada atmosférica de Schiaparelli comenzó en un punto situado aún en el espacio por encima de las capas más altas de la atmósfera de Marte. Este punto es denominado interfaz de entrada y, en el caso de Schiaparelli, tuvo lugar a 121 km de altitud. En este punto la sonda efectuó su entrada a casi 6 kilómetros por segundo con un ángulo de trayectoria específico de manera que la nave experimentara los niveles de carga térmica y estructural en los rangos para los que fue diseñada así como para alcanzar el punto de despliegue del paracaídas en las condiciones deseadas de altitud y velocidad más tarde en la trayectoria.
En el diseño de una entrada atmosférica, la nave debe llegar al interfaz de entrada con la orientación y con la velocidad de orientación adecuadas, parámetros que dependen de distintos factores. El escudo térmico debe estar posicionado correctamente para enfrentar al flujo aerodinámico que encontrará durante la travesía atmosférica y, en el caso de Schiaparelli, la nave debía estar girando alrededor de su eje longitudinal a una velocidad angular pequeña (entre dos y tres revoluciones por minuto) para proporcionar estabilidad en su orientación en su periplo desde su suelta por la Trace Gas Orbiter hasta entrar en la atmósfera marciana ya que el módulo de descenso no poseía un sistema de control de orientación.
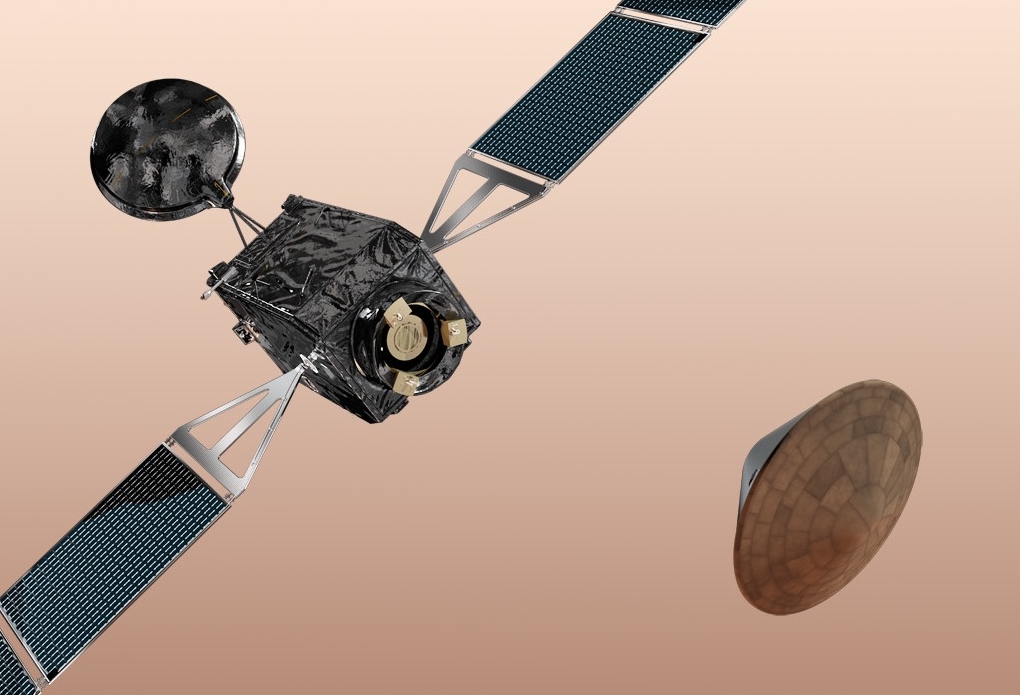
Schiaparelli separándose de la ExoMars Trace Gas Orbiter. Fuente: ESA/AOES Medialab.
Esta pequeña velocidad de rotación también asegura que la entrada atmosférica sea balística; esto es, sin sustentación aerodinámica. La ausencia de sustentación en una cápsula se consigue diseñando la nave de forma que su centro de masa esté contenido en su eje de simetría y este era el caso en Schiaparelli; sin embargo, siempre hay un pequeño error inevitable en esta localización cuyo efecto de sustentación en la atmósfera se anula si se hace girar la nave. Una entrada balística no requiere de sistemas de control y de guiado para dirigir la nave hacia un lugar de aterrizaje específico, con lo que se reduce la complejidad del diseño. Por otra parte, si bien en una entrada balística, por tratarse de una entrada no guiada, el punto de aterrizaje puede darse dentro de una región más amplia que en el caso de una entrada guiada con sustentación, el punto de aterrizaje se dará dentro de una región menos amplia que en el caso de una entrada no guiada con sustentación, siendo esta última la razón por la que en una entrada que no sea guiada, por lo general se trata de conseguir sustentación nula. Excepciones a esta idea fueron las Viking 1 y 2, por ejemplo, naves que, por distintas razones, estuvieron dotadas de cierto grado de sustentación a pesar de volar entradas no guiadas en Marte.
Durante la entrada, la nave va siendo frenada por la atmósfera según va perdiendo altitud hasta alcanzar las condiciones adecuadas de altitud y velocidad en las que se puede desplegar el paracaídas de forma que la presión dinámica sea suficiente para propiciar su apertura sin comprometer su integridad. Una nave como Schiaparelli precisa de un paracaídas debido a que la baja densidad atmosférica de Marte (apenas la centésima parte de la terrestre) es incapaz de frenarla hasta velocidades inferiores a la del sonido (en Marte), algo que es necesario debido a aspectos de estabilidad y de control para iniciar la retropropulsión en la última fase de aterrizaje. Es, por otra parte, debido a esta baja densidad atmosférica que se selecciona una zona de aterrizaje de poca elevación, o de elevación por debajo del nivel medio, con objeto de que el recorrido atmosférico sea mayor para conseguir un mayor frenado. Schaiparelli tenía planeado aterrizar en el Meridani Planum, en una región próxima a aquella en la que aterrizó Opportunity es su día, cuya elevación se sitúa entre uno y tres kilómetros por debajo del nivel de la superficie media en Marte.
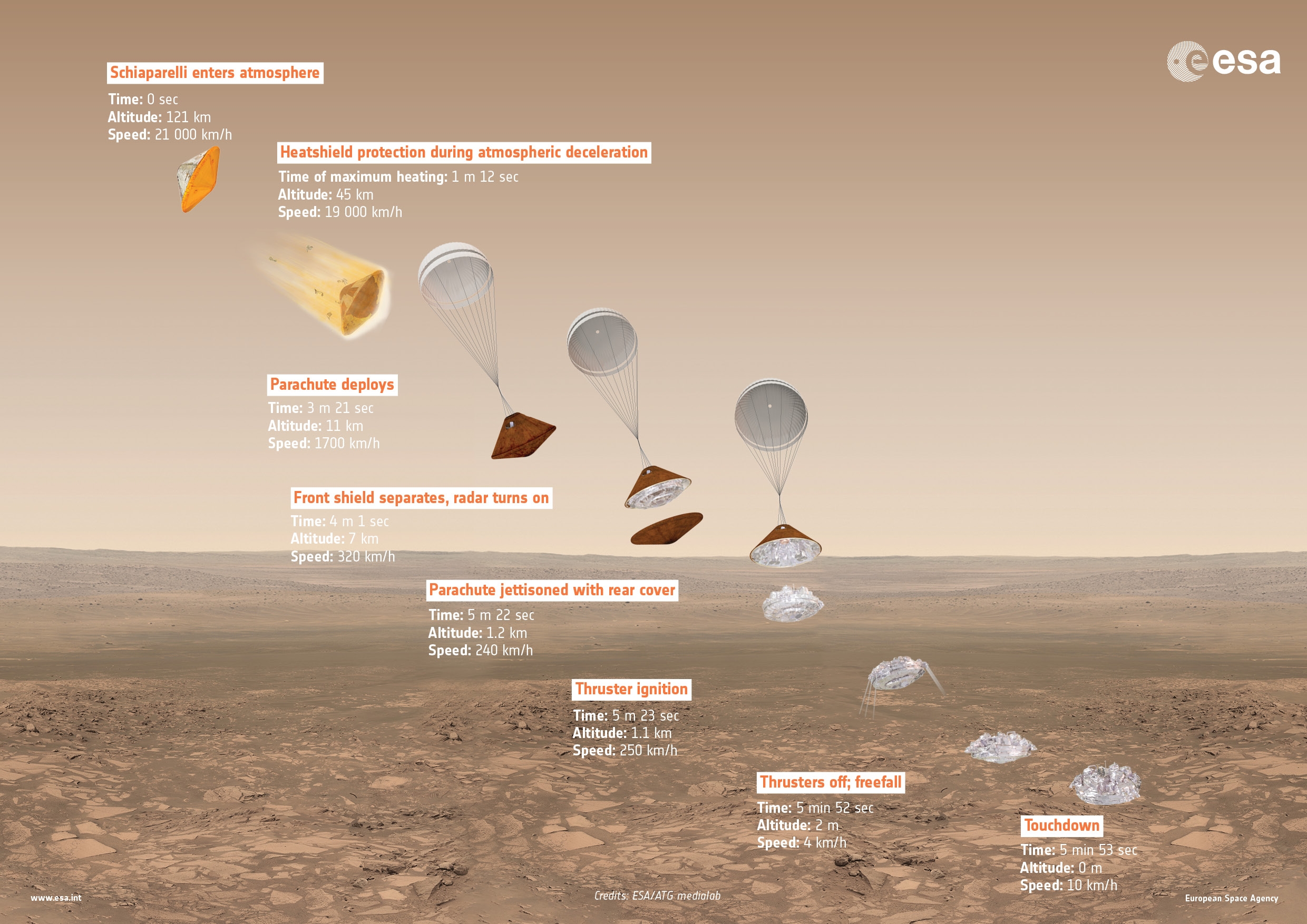
Secuencia planeada de entrada, descenso y aterrizaje de Schiaparelli. Fuente: ESA/ATG medialab.
Hasta el momento de la apertura del paracaídas, Schiaperelli no realizó ninguna maniobra ya que, como se ha dicho antes, no estaba siendo guiada por tratarse de una entrada balística; pero, en su interior, la nave iba estimando su posición y velocidad mediante la integración en el tiempo del efecto del frenado aerodinámico que medían sus acelerómetros en un instrumento de navegación llamado Unidad de Medida Inercial (IMU). Una vez la altitud y velocidad determinadas por este sistema de navegación fueron idóneas, la señal fue transmitida para desplegar el paracaídas.
Una vez se despliega el paracaídas, a unos 11 km de altitud y a unos 470 metros por segundo en condiciones normales, y algo que, según la ESA sucedió alrededor del momento previsto, dio comienzo la llamada fase de descenso, que comprende los aproximadamente dos minutos que está operativo el paracaídas. Poco después de su despliegue, la nave se desprendió del escudo térmico para exponer al suelo marciano un radar que mide la altitud y la velocidad de la nave con respecto al terreno.
El tirón del paracaídas y su apertura genera torques sobre la nave que hacen que ésta se tambalee en cierto grado. Por esta razón, el escudo térmico se separa cuando ha transcurrido un cierto tiempo desde el despliegue del paracaídas (40 segundos en el caso de Schiaparelli). Este es el tiempo considerado necesario con un margen de seguridad de forma que las oscilaciones de la nave se atenúen lo suficiente para permitir una separación segura del escudo térmico y evitar así un posible recontacto.
Una vez separado el escudo térmico, el radar se activa y sus medidas son incorporadas a la solución de navegación de cara a afrontar la última fase de aterrizaje: el tramo final de la trayectoria que el aterrizador vuela de forma retropropulsada una vez se separen el paracaídas y la cubierta de la nave. Mediante el uso del radar, la solución de navegación se adapta a las características locales del terreno ya que es imposible predecir precisión la elevación e inclinación del suelo con los que se encontrará la nave más allá de un cierto rango estimado. Esto es debido a que el aterrizaje se puede dar en cualquier punto contenido en una región muy extensa con forma de elipse llamada elipse de aterrizaje, que en el caso de Schiaparelli fue de 100 km de largo por 15 km de ancho.
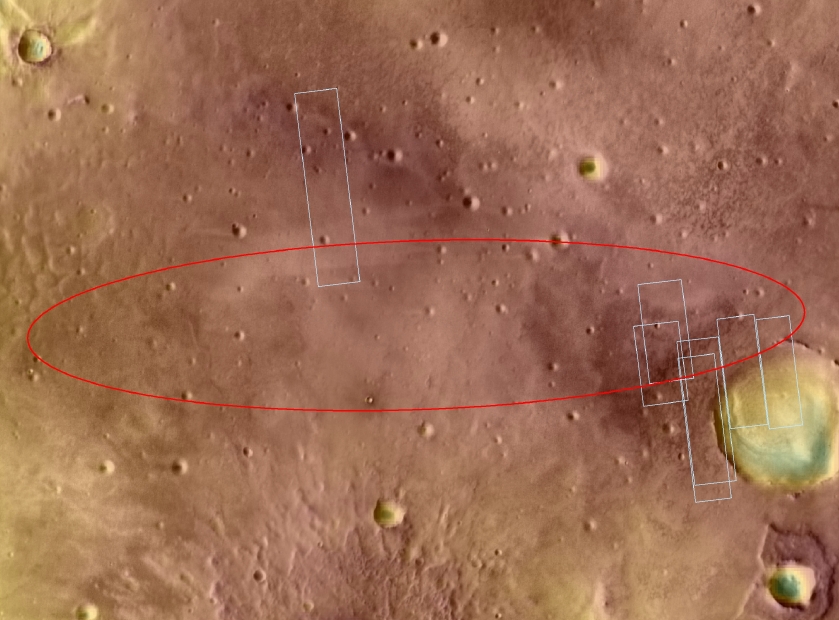
Elipse de aterrizaje de Schiaparelli (100 x 15 km). Fuente: IRSPS/TAS-I.
La razón de esta elipse radica en que la nave puede experimentar condiciones de vuelo muy diversas: distintos niveles de densidad atmosférica o vientos a distintas altitudes, un ángulo de trayectoria inicial ligeramente distinto del planeado, características aerodinámicas de la nave algo distintas de las que han sido caracterizadas en tierra, etc. Todas estas posibles diferencias se dan dentro de unos intervalos que bien se conocen o bien se pueden acotar. En los análisis previos a una misión como la de Schiaparelli, las fases de entrada, descenso y aterrizaje se simulan en presencia de diferentes combinaciones de todos estos tipos de diferencias y se comprueba que la misión se puede llevar a cabo con éxito en su presencia. Es debido a estas diferencias que, aunque se tiene como objetivo aterrizar en un punto determinado de la superficie, el lugar previsto de aterrizaje no es un punto sino la referida elipse de aterrizaje. Cabe apuntar aquí que Schiaparelli acabó impactando a 5,4 km al oeste del lugar planeado de aterrizaje y, por lo tanto, bien dentro de la elipse de aterrizaje.
Hacia el final de la fase de descenso, cuando se dan las condiciones más idóneas para el inicio de la última fase propulsada, tanto el paracaídas como la cubierta de la nave se separan, algo que debió haber sucedido a 1,2 km de altitud en condiciones normales. A partir de aquí, el sistema de propulsión debería haber maniobrado ligeramente la nave a una orientación propicia para comenzar el aterrizaje propulsado de acuerdo a un tipo de descenso llamado de giro por gravedad en el que toda la fuerza propulsiva se utiliza para contrarrestar el vector velocidad de la nave. Por esta técnica, la nave va perdiendo velocidad horizontal a la vez que va adquiriendo progresivamente una orientación que la llevará a realizar un descenso vertical sobre la superficie en los últimos metros.
Preliminarmente, los datos parcialmente analizados en su día por la ESA parecieron confirmar que todo se desarrolló según lo esperado hasta el momento de la separación del paracaídas y de la cubierta de la nave, aunque hay que notar que este evento combinado se produjo antes de lo previsto, lo que podía indicar bien que había habido un problema a bordo que lo hubiera precipitado o bien que entraba dentro de lo posible en algunas condiciones de vuelo menos probables. Los datos preliminares analizados poco después del accidente también apuntaron a que los retrocohetes se llegaron a encender seguidamente pero solo para pasar a apagarse de forma prematura. Por otra parte, las imágenes del impacto proporcionadas por la Mars Reconnoissance Orbiter de la NASA, hicieron estimar que Schiaparelli cayó sin control desde una altitud de entre 2 y 4 km. Estos hechos fueron, además, compatibles con el momento en el que se produjo la pérdida de la señal, 50 segundos antes del momento esperado en el que debía haberse posado la nave, según informó también la ESA. Así pues, según lo expuesto en su día de forma preliminar por la ESA, se desprendió que bien hubo algún tipo de problema posterior al despliegue del paracaídas. El informe revela ahora lo que sucedió.
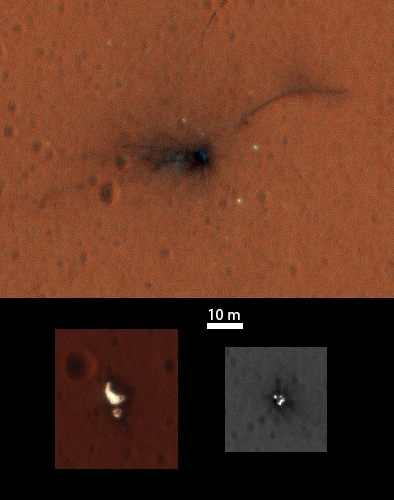
Elementos de Schiaparelli vistos por el Mars Reconnaissance Orbiter de la NASA. Fuente: NASA/JPL-Caltech/University of Arizona.
Tal y como establece el informe EXOMARS 2016 – Schiaparelli Anomaly Inquiry, el accidente parece haber tenido su causa en el hecho de que la Unidad de Medida Inercial (IMU) a bordo fue saturada momentáneamente un instante después de que se produjera el despliegue del paracaídas. Apenas un instante después de haberse producido el hinchado del paracaídas, la nave experimentó una velocidad angular de cabeceo mayor de la que el IMU estaba capacitado para medir, haciendo que este instrumento quedara saturado en esta medida durante un corto espacio de tiempo que, además, fue mayor del estipulado en los requerimientos. Durante este tiempo, el sistema de navegación estuvo integrando el valor saturado de esta velocidad angular mientras la nave realmente estaba experimentando velocidades angulares distintas. Pasado el tiempo de saturación, la navegación a bordo creyó que la nave volaba dada la vuelta cuando, en realidad, lo hacía con el escudo térmico correctamente posicionado.
Poco después de que el escudo térmico fuera eyectado, entró en acción el radar, encargado de medir la altitud y la velocidad de la nave con respecto al terreno. Para determinar la altitud a la que está la nave, dado que ésta no vuela verticalmente sino que posee aún una alta componente de velocidad horizontal que hace que el radar no esté inicialmente apuntando sobre el suelo, el eco del radar debe ser corregido con la medida de la orientación con la que vuela la nave. Sin embargo, dado que la navegación de a bordo creía volar al revés, la altitud computada resultó ser negativa (una altitud por debajo del terreno).
A partir de aquí, todo procedió de forma errónea ya que las condiciones para que se produjeran algunos de los eventos siguientes estaban basados en altitud, bien total o parcialmente. Tanto la separación de la cubierta como la del paracaídas estaban basados en altitud, mientras que el apagado de los retrocohetes, encargados de propiciar el frenado último de la nave, se comandaba en función de la energía de la nave, que es una función de varios parámetros, entre ellos la altitud. Es por esta razón que los retrocohetes estuvieron encendidos solamente por un espacio tiempo insuficiente de 3 segundos en lugar de los 30 segundos que eran requeridos aproximadamente, con lo que la nave cayó sin control desde una altitud de 3,7 km para acabar impactando a unos 540 km/h.
El informe revela que el IMU no falló sino que operó en la manera en que estaba diseñado, y apunta a deficiencias en el proceso de análisis de la misión y en su diseño así como en la manera en la que se aceptó el IMU por parte del programa. Por una parte, el hecho de que el IMU experimentara una condición que excedía su capacidad de medida hace plantearse con qué grado de fidelidad fue simulada la misión en el proceso de análisis y de diseño.
En este sentido, el informe desvela que, en efecto, la ESA no utilizó el nivel de fidelidad adecuado en la simulación de un proceso tan dinámicamente complejo como es el despliegue e hinchado del paracaídas y de su efecto en la nave. De hecho, tal como indica el informe, posteriores simulaciones del despliegue del paracaídas de Schiaparelli bajo un gran número de condiciones posibles utilizando el modelo de alta fidelidad del JPL (Jet Propulsion Laboratory) de la NASA revelaron velocidades angulares que superaron en muchos casos el valor de saturación del IMU empleado.
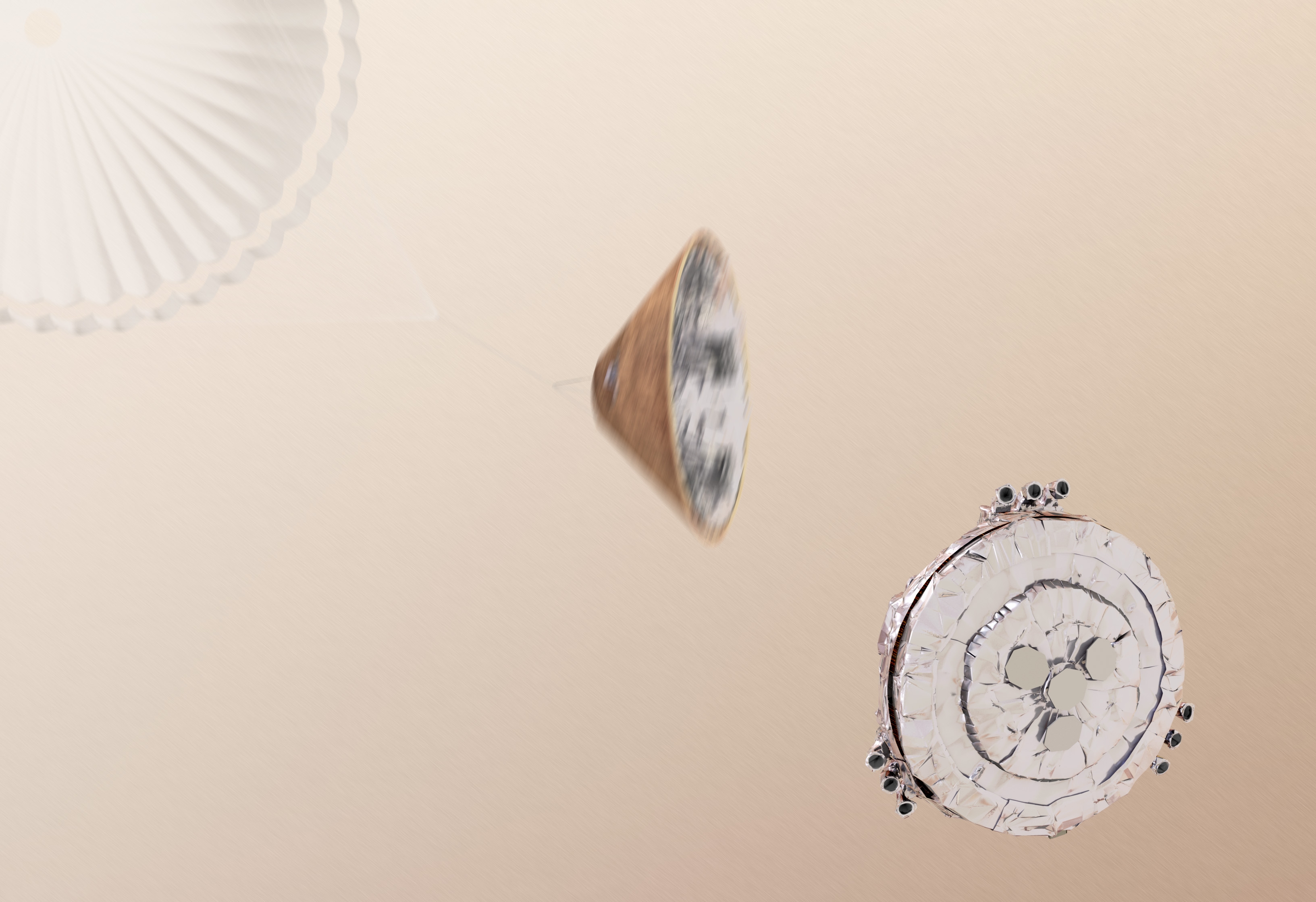
Schiaparelli después de la separación del paracaídas y de la cubierta. Fuente: ESA/ATG medialab.
La ESA apunta correctamente a que el software de vuelo a bordo ofreció carencias de diseño en la detección de fallos o inconsistencias entre distintas condiciones y medidas, y que debería haber podido aportar una mayor robustez al diseño. Por ejemplo, el diseño del código debería haber hecho un manejo distinto de un tiempo de saturación más prolongado que el requerido, o debería haber podido identificar el conflicto que suponía recibir un eco del terreno por parte del radar mientras que la nava creía volar al revés.
Por último, también se identifica en el informe la necesidad de revisar la manera en la que se aceptan equipos suministrados por contratistas, como lo fue el IMU. En este caso, se asumió un tiempo de saturación de 15 milisegundos cuando, en verdad, el IMU operaba con un tiempo de saturación mayor. De hecho, el informe afirma que de haber sido 15 milisegundos el tiempo de saturación, Schiaparelli podría haber efectuado con éxito el aterrizaje.
Por otra parte, en el lado positivo, tal como indica también el informe, recordando que Schiaparelli era un demostrador tecnológico, una parte muy significativa de los objetivos de demostración fueron cumplidos y es cierto que muchos elementos de su diseño han podido ser validados en esta misión así como se han podido identificar muchas mejoras. Los fracasos sirven para aprender de los errores, y estoy seguro de que la lección extraída en esta ocasión no será desperdiciada por la ESA, una institución a la que, además, es justo agradecer que comparta con el público no solo sus numerosos, reconocidos e importantes éxitos sino también sus fracasos y el resultado de sus investigaciones, como es el caso del informe referido en este escrito y al que se puede acceder aquí.
Super saber todo esta información. gracias al señór Eduardo Garcia Ll.
muy interesante la información que publica con mucho detalle.
Quisiera estar vivo para cuando el ser humano llegue a marte y regrese.. .. como cuando fue a la luna. ..
MUY INTERESANTE EL INFORME. MUY AGRADECIDO. UNQ PREGUNTA .PORQUE SE QUIERE COLONIZAR MARTE Y NO SE HACE QNTES EN LA LUNA QUE ESTA MAS CERCA Y CUESTA MENOS?.GRACIAS.