

El pasado 20 de julio se cumplió el 47 aniversario del alunizaje en la misión Apolo 11. Durante el descenso a la superficie del módulo lunar Eagle se sucedieron numerosos imprevistos que tuvieron que ser sorteados por la tripulación y por el equipo de control en Houston. En especial, la aparición de varias alarmas a bordo y un error en la navegación complicaron aún más una fase de vuelo que se acometía por primera vez en la historia y que era ya, de por sí, la más crítica y difícil de esta misión.
El descenso se inició desde la órbita alrededor de la Luna en la que estaban el módulo lunar (LM – Lunar Module) y el módulo de mando y servicio. Desde esta órbita de 110 km de altitud -llamada de aparcamiento– el LM realizó la inserción en la órbita de descenso (DOI – Descent Orbit Insertion), un corto encendido de su motor de unos 30 segundos que lo puso en una trayectoria de descenso con un perilunio (punto más cercano a la Luna) de unos 15 km al que se llegaba media revolución orbital después y donde daba comienzo el descenso propulsado (PDI – Powered Descent Initiation), el momento en el que se encendía de nuevo el motor del LM, que ya no se apagaría hasta que la nave estuviera posada en un punto de la superficie situado a unos 460 km de distancia.
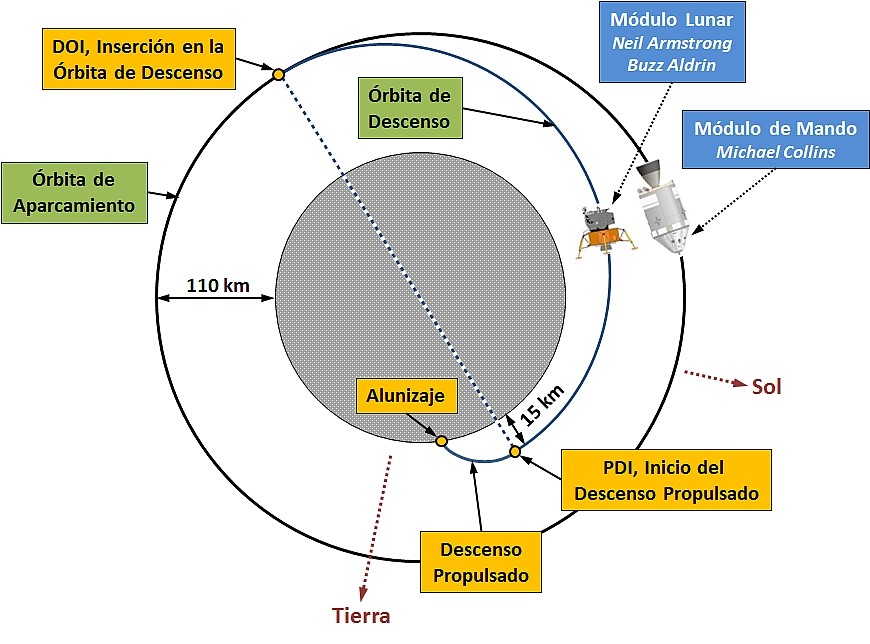
Esquema del descenso a la superficie lunar desde la órbita de aparcamiento. Autor: Eduardo García Llama.
La fase de descenso propulsado que se iniciaba en el PDI duraba apenas 12 minutos y medio y constaba a su vez de tres fases: la primera, llamada de frenado, tenía por objetivo reducir la velocidad del LM de la manera más óptima en términos de consumo de combustible a la vez que se perdía altitud; cuando la distancia al objetivo fue de unos 8 km y la altitud de unos 2 km, punto denominado high gate, daba comienzo la fase de aproximación, en la que el LM comenzaría a cabecear pasando de una orientación en la que la tripulación volaba ‘cara arriba’ (hacia el cielo lunar) a otra en la que la tripulación pudiera ver la superficie lunar frente a ellos para posibilitar la inspección visual del futuro punto de alunizaje; llegados a unos 700 m de distancia al objetivo y a unos 150 m de altitud, punto denominado low gate, se entraba en la fase llamada propiamente de alunizaje, donde Armstrong asumió el control manual de la nave, que hasta ese momento había volado con guiado automático, para acabarla posando en el lugar que juzgó más adecuado.
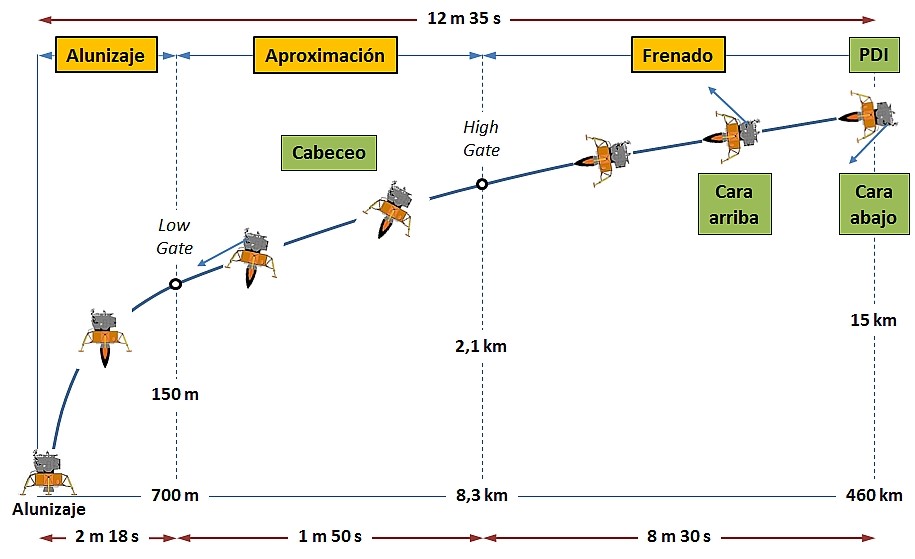
Esquema de la fase de descenso propulsado. Autor: Eduardo García Llama.
El LM tenía la capacidad de volar la fase de alunizaje de forma automática. La ventanilla del comandante poseía un dispositivo llamado Indicador del Punto de Alunizaje (LPD – Landing Point Designator) que consistía en dos retículas graduadas, una grabada en el exterior de la ventanilla y otra en el interior, cuya función era la de indicar visualmente al comandante el punto sobre la superficie al que les llevaba el guiado automático. Cuando el LM ya hubiera cabeceado lo suficiente como para permitir la observación del terreno, la tripulación podía solicitar a la computadora el ángulo del LPD, el valor para las dos retículas tales que cuando el comandante las hiciera coincidir en su línea de visión, la proyección de esa línea en la superficie sería el punto en el que el sistema automático de guiado posaría la nave de no asumirse el control manual.

Detalle del Indicador del Punto de Alunizaje en la ventanilla del comandante desde el interior del módulo lunar. Fuente: Digital Apollo: Human and Machine in Spaceflight.
Armstrong podía cambiar el punto de alunizaje indicado por el LPD a través de la palanca de mando de control de orientación (ACA – Attitude Control Assembly) de forma que movimientos discretos horizontales (adelante o atrás) o laterales (izquierda o derecha) de esta palanca redesignaban el lugar de alunizaje en incrementos fijos de distancia angular horizontal y lateral, respectivamente, desde el lugar previo. Sin embargo, Armstrong desestimó el uso de esta capacidad.
Durante la fase de aproximación, Armstrong pudo comprobar que los ángulos del LPD suministrados por la computadora apuntaban a lugares de alunizaje ligeramente distintos, lo que le indujo a apreciar que el desempeño de este sistema no estaba siendo fiable y, por lo tanto, a desestimar su uso. Efectivamente, análisis posteriores al vuelo mostraron que este sistema fue afectado por el efecto que los movimientos de los distintos fluidos (combustible, oxidante, etc.) almacenados en los tanques del LM (sloshing) tuvieron en la propia dinámica del LM, un problema que fue resuelto para los siguientes vuelos.
Por otra parte, Armstrong también pudo ver que el alunizaje iba a producirse en una zona que contaba con numerosas rocas de tamaños diversos. El área en el que acabaron teniendo que alunizar se encontraba a algo más de 6 km de distancia del lugar planeado, un hecho que fue consecuencia de un error en la inicialización de la navegación al inicio del descenso y que fue identificado por Armstrong antes del PDI. Este error también fue resuelto en posteriores vuelos, que acabarían efectuando alunizajes de precisión.
Una vez alcanzado el low gate, Armstrong decidió pilotar el LM manualmente controlando su orientación mediante el uso del ACA de forma parecida a como se haría en un helicóptero y controlando la velocidad de descenso mediante el uso del interruptor ROD (Rate of Descent) con el que podía aumentar o reducir esta velocidad en incrementos de 1 pie/s (unos 30 centímetros por segundo).
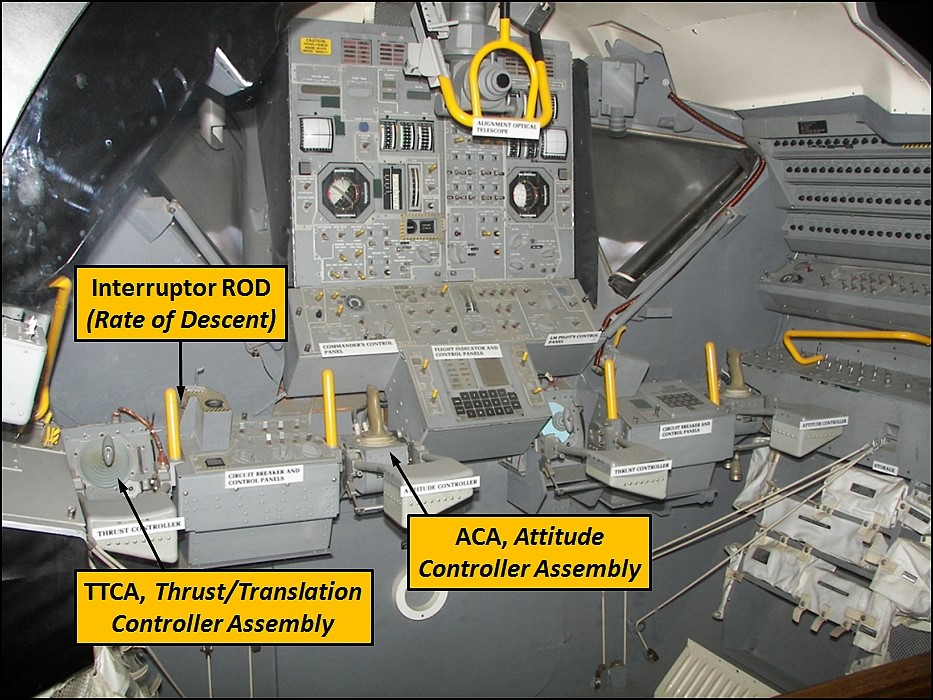
Simulador del módulo lunar. Se indican los sistemas de control de orientación (ACA) y de velocidad de descenso (ROD). El sistema TTCA de control del empuje del motor de descenso y de traslación estaba concebido para situaciones de contingencia. Fuente: Richard Kruse con adaptación del autor.
Las fases de frenado y aproximación no podían ser voladas de forma manual con garantías de éxito ya que el margen de error era extremadamente pequeño; sin embargo, la fase de alunizaje sí estaba concebida con márgenes para ofrecer la capacidad de vuelo manual en la búsqueda de un lugar adecuado donde posar la nave. En cualquier caso, independientemente de la necesidad de pilotar el LM manualmente; esto es, independientemente de la presencia de rocas o del no funcionamiento del LPD, Armstrong habría asumido igualmente el control manual de la nave debido a su propia condición como piloto de pruebas. De hecho, ninguno de los comandantes de las misiones Apolo dejó pasar la oportunidad de experimentar personalmente el pilotaje del módulo lunar y todos ellos volaron la fase de alunizaje de forma manual.
Con una fase de alunizaje manual de 2 minutos y 18 segundos, el vuelo delEagle fue el que finalizó con la menor cantidad de combustible de todas las misiones lunares, quedándose a tan solo 25 segundos del momento Bingoen el que el comandante habría estado obligado a decidir si abortar o alunizar, esto último si estimaba que podría conseguirlo en los 20 segundos siguientes (no confundir con que quedaban 25 segundos de combustible).
Una de las razones por la que la fase de vuelo manual fue tan larga se puede asociar a la aparición de las cinco alarmas del programa (program alarms) que llegaron a sucederse durante las fases de frenado y de aproximación hasta tan solo 24 segundos antes de que Armstrong asumiera el control manual. Análisis posteriores determinaron que las alarmas se produjeron por un error en el diseño del sistema eléctrico por el que se provocaba el envío de interrupciones desde el radar de rendezvous (radar para ser utilizado en las posteriores maniobras de reencuentro con el módulo de mando y servicio) a la computadora que hacían que ésta se saturara ocasionalmente, emitiendo así, tal y como estaba programada, la alarma correspondiente.
Afortunadamente, la computadora del LM estaba concebida para que operara al 85% de su máxima capacidad durante las fases de vuelo de mayor carga de procesamiento, dejando así un margen de un 15% para situaciones imprevistas. Y por otra parte, dos características específicas muy innovadoras de su diseño constituían grandes salvaguardas ante contingencias. Por un lado, su sistema ejecutivo asíncrono ejecutaba tareas siguiendo un sistema de prioridades preestablecido por el que descartaba tareas no esenciales en caso de saturación. Y por otro lado, la computadora también poseía un sistema de protección de reinicio por el que podía interrumpir tareas incompletas, reiniciarse y reanudar las tareas esenciales donde hubieran sido interrumpidas con anterioridad.
Las interrupciones que enviaba el sistema eléctrico del radar a la computadora, en combinación con otras tareas, hacían que ésta saturara en ocasiones su 15% de margen, resultando así en las referidas alarmas, las cuales también implicaron el apagón momentáneo del interfaz de la tripulación con la computadora y el reinicio de ésta cada vez que sucedían. Una vez que Armstrong asumió el control manual, las exigencias de procesamiento de la computadora descendieron significativamente, lo que explica que no se produjeran más alarmas, aunque eso era algo que nadie estaba en condiciones de anticipar en aquel momento.

Neil Armstrong tuvo que eyectar el 6 de mayo de 1968 del vehículo de entrenamiento LLRV (Lunar Lander Research Vehicle), que simulaba el desempeño del módulo lunar, debido a un fallo en el sistema de control. Fuente: NASA.
La presencia de estas alarmas supuso una importante distracción que hizo que Armstrong prestara más atención de lo normal al panel de instrumentos en lugar de al exterior de la nave durante la la fase de aproximación, lo que resultó en que realizara la inspección del lugar de alunizaje relativamente tarde. Para cuando identificó un lugar seguro para alunizar, no estuvo convencido de poder posar ahí la nave, por lo que decidió sobrevolarlo en busca de otro lugar, alargando así la duración de esta fase con el consiguiente descenso de combustible.
Más tarde, el levantamiento de polvo lunar y su proyección radial por efecto del motor según se acercaban a la superficie dificultó a Armstrong su percepción visual del movimiento de traslación en los tres ejes; además, la orientación de la nave le impedía la visión de su sombra (que si fue visible para Aldrin), lo que le habría supuesto una ayuda visual para estimar la altitud. A pesar de que Aldrin verbalizaba los parámetros de vuelo que eran de interés para Armstrong, éste reconoció que estos efectos le indujeron a «sobrecontrolar» la nave durante la última parte del vuelo.
Finalmente, después de un descenso que Armstrong calificó con un 13 de dificultad sobre 10, debido especialmente a todas las complicaciones que surgieron, y en el que llegó a alcanzar 150 pulsaciones por minuto, éste acabó posando el Eagle sobre la superficie lunar, un hecho que, como piloto de pruebas, destacó como el más importante de la misión, mucho más relevante para él que el momento en el que pisó el suelo lunar con su bota.
Una interesante explicación y el consiguiente aprendizaje de los sucesos, de lo que para muchos de los que peinamos canas supuso este acontecimiento y que vivimos con gran intensidad. En una exposición, realizada en la Casa de Campo de Madrid hace unos años, pude comprobar lo precario que era todo lo que utilizaron estos hombres para conseguir su objetivo.