

Cómo algunas tecnologías en el campo de la robótica espacial están siendo aplicadas ahora en el campo médico.
En la entrada anterior nos hicimos eco de algunos de los desarrollos en el campo médico que se están posibilitando gracias a investigaciones realizadas a bordo de la Estación Espacial Internacional (ISS); en esta ocasión, con motivo de la reciente elección del robot antropomorfo Robonaut 2 como invento del año de la NASA, quiero destacar cómo tecnologías que se han venido usando en el campo de la robótica espacial están siendo aplicadas ahora en el campo médico.
A mediados de los 90′, el profesor de neurocirugía de la Universidad de Calgary, Garnette Sutherland, inició un proyecto para desarrollar un equipo de tomografía por resonancia magnética para la toma de imágenes de los cerebros de los pacientes dentro de la sala de operaciones durante las intervenciones de neurocirugía para así mejorar la efectividad de las mismas. El equipo fue finalmente desarrollado y probado por primera vez en 1997, con éxito; pero el profesor Sutherland quiso ir aún mucho más lejos. Se preguntó si sería posible no tener que interrumpir las operaciones durante la toma de imágenes y su evaluación, sino que estas se pudieran tomar al borde de la cavidad del aparato de resonancia y que la cirugía pudiera ser guiada por estas imágenes de forma simultanea.
El profesor Sutherland pensó que la solución a su planteamiento podría ser un robot quirúrgico que, además, posibilitara el aumento de la precisión de las intervenciones. La idea involucraba un enorme reto, el de desarrollar un robot teleoperable que pudiera realizar con mayor precisión que hasta el momento las actividades quirúrgicas requeridas guiadas por imagen en la presencia del campo magnético generado por el equipo de resonancia. Para satisfacer todos los requisitos, el robot debía poseer una gran destreza, ser adaptable a una gran variedad de instrumentos quirúrgicos, y sus componentes (cámaras, motores, actuadores, etc.) no solo no debían verse afectados por el imán del equipo de tomografía sino que la presencia del robot tampoco debía afectar la calidad de las imágenes tomadas.
Todos estos requisitos constituían grandes desafíos, y satisfacerlos no iba a ser una tarea fácil; pero, afortunadamente, para intentar llevar a cabo su idea, el profesor Sutherland tenía un sitio donde mirar: MacDonald Dettwiler and Associates Ltd (MDA), la empresa que había diseñado y construido los sofisticados robots Canadarm, Canadarm2 y Dextre para la Agencia Espacial Canadiense.

Robots de la Agencia Espacial Canadiense: Canadarm2 (izda.) acoplando la nave de carga japonesa HTV a la ISS; y Dextre (dcha.) realizando trabajos en el exterior de la ISS. Fuente: NASA.
Canadarm2 es un brazo robot de 17 metros, de más de una tonelada y media, articulado con siete grados de libertad (tres en su ‘hombro’, uno en su ‘codo’, y tres en su ‘muñeca’) que se usa en la ISS principalmente para labores de ensamblaje de nuevos módulos, como plataforma para los astronautas durante sus salidas extravehiculares, o para atrapar algunas de las naves que visitan la estación para acoplarlas a ella. Canadarm2 puede desplazarse por el exterior de la ISS (de unos 108 metros de largo) mediante la unión y desunión de sus extremos para así poder alcanzar diferentes enclaves desde donde realizar sus trabajos. Para poder hacer todo esto, Canadarm2 posee sensores de fuerza que le aportan sentido del tacto y un sistema de visión que le permite evitar obstáculos y capturar objetos en vuelo de forma autónoma.
Dextre, por otra parte, es un robot de enorme sofisticación, de algo más de 3 metros y medio, altamente versátil y articulado que se utiliza principalmente para labores de mantenimiento en el exterior de la ISS, reemplazando muchos tipos de equipos (baterías, computadoras, cajas de interruptores, etc.) que de otra manera habrían de ser reemplazados por astronautas en actividades extravehiculares. Al utilizar a Dextre para estas labores se evita un gran número de salidas al exterior por parte de los astronautas, reduciendo así, por tanto, un riesgo para ellos, y posibilitando el aumento de la cantidad de tiempo que pueden dedicar a la realización de experimentos científicos a bordo de la estación.
Dextre puede operar con numerosas herramientas y con objetos de masas muy diferentes, puede proveer imágenes de sus actividades, proporcionar electricidad a equipos mientras los manipula, posee una gran precisión y un sentido del tacto muy sofisticado, lo que le permite ejercer de forma autónoma la fuerza adecuada en la dirección adecuada para realizar diversas tareas. Dextre es, a día de hoy, el robot espacial más sofisticado jamás construido.
La empresa MDA, con tantos años de demostrada experiencia en el diseño y construcción de robots para tareas tan complejas en un ambiente tan extremo como el espacial, se puso manos a la obra y desarrolló NeuroArm, el robot que satisfizo los rigurosos requisitos establecidos por el doctor Sutherland y su equipo de la Universidad de Calgary para la realización de intervenciones quirúrgicas en las condiciones deseadas, y el primer robot quirúrgico del mundo compatible con el uso simultáneo de equipos de tomografía por resonancia magnética durante las intervenciones.

NeuroArm. Fuente: neuroarm.org y Universidad de Calgary.
NeuroArm es un robot muy articulado y adaptado para poder operar con los instrumentos quirúrgicos requeridos en las intervenciones de neurocirugía, está compuesto de materiales resistentes pero de muy poco peso que, al igual que sus compañeros en el espacio, incluyen polímeros no magnéticos para no interferir con el funcionamiento del equipo de resonancia magnética. NeuroArm está dirigido por el neurocirujano de forma remota desde una sala adyacente a la sala de operaciones. Desde su terminal, el cirujano puede observar las imágenes tomadas por el equipo de tomografía además de imágenes de muy alta resolución de la intervención en tres dimensiones, lo que le permite intervenir sobre el paciente apoyándose en la detallada información proporcionada por esas imágenes. El robot filtra las vibraciones del pulso del cirujano y, escalando los desplazamientos de su mano, el robot puede operar en los tejidos en incrementos de 50 milésimas de milímetro. NeuroArm, al igual que sus compañeros espaciales, posee un sofisticado sentido del tacto, si bien mucho más refinado, que le permite sentir con un umbral inferior al humano las texturas y sus cambios en los diferentes tejidos, sensaciones que son enviadas a los dedos del neurocirujano mientras maneja su terminal.
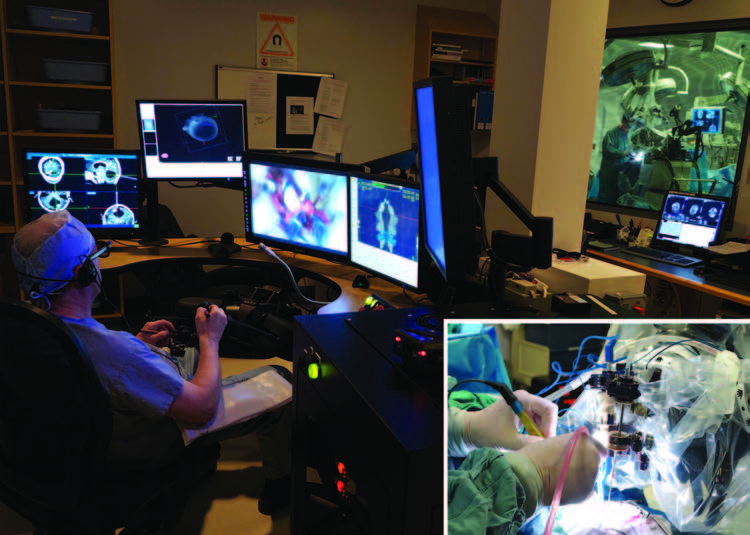
El profesor Sutherland manipulando NeuroArm desde su terminal fuera de la sala de operaciones (al fondo). Fuente: neuroarm.org.
En mayo de 2008, el doctor Sutherland realizó la primera operación utilizando NeuroArm para extirpar un tumor cerebral de una paciente canadiense de 21 años y, desde entonces, ha sido utilizado con éxito en numerosas ocasiones. NeuroArm fue galardonado en 2012 con el premio a la más alta aplicación médica (Top Medical Application) surgida a partir de la Estación Espacial Internacional, reconociendo así la relevante y exitosa transferencia tecnológica entre campos tan diferentes como el de la exploración espacial y la neurocirugía, a la vez que el doctor Sutherland fue galardonado por la NASA este año con la Medalla al Logro Excepcional en Tecnología, un premio dentro de la categoría de los Premios de Honor de la NASA.
Pero la historia no acaba aquí. El Centro para la Invención y la Innovación Quirúrgica de Canadá también recurrió a la tecnología de Canadarm para desarrollar IGAR, o Robot Autónomo Guiado por Imagen, que permite la biopsia, diagnosis, e intervención milimétrica sobre el cáncer de mama, todo en un único procedimiento médico que es además menos invasivo y más preciso que lo eran las prácticas médicas hasta entonces. Por otra parte, el Centro SickKids para la Innovación y la Intervención Terapéutica Guiada por Imagen, también en Canadá, desarrolla en la actualidad el robot KidsArm, un robot específicamente diseñado para intervenciones quirúrgicas pediátricas que también está siendo desarrollado a partir de las tecnologías espaciales que fueron desarrolladas en su día para Canadarm, Canadarm2 y Dextre.
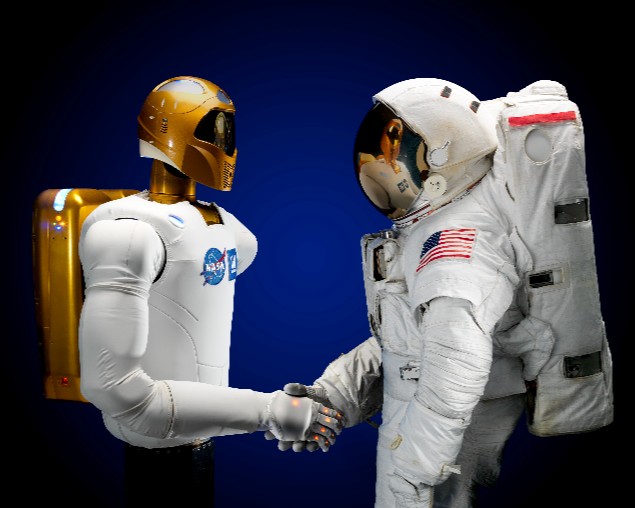
Por otra parte, en los últimos años, la NASA ha trabajado, junto con General Motors y Oceaneering Space Systems, en el desarrollo de un robot humanoide de gran desteridad para la realización de un amplio abanico de actividades, tanto individuales como de forma conjunta con los astronautas, y tanto en el interior como en el exterior de la ISS, en un intento por conseguir niveles de desteridad y versatilidad robóticas que mejoren las capacidades operativas actuales en el espacio. Una versión de este robot, llamado Robonaut 2, ya se encuentra en la estación espacial para la realización de diversas pruebas y fue reconocido el pasado junio como Invento Gubernamental del Año de la NASA.

Robonaut 2. Fuente: NASA.
Son numerosas las patentes que han sido generadas en el desarrollo de Canadarm, Dextre o Robonaut; patentes tecnológicas que en realidad son aplicables a una gran variedad de sectores industriales, no sólo el médico. Sólo la inversión en el desarrollo de Robonaut 2 ha generado alrededor de 50 nuevas patentes en robótica, a las que a buen seguro se encontrarán aplicaciones en las industrias médica, logística, de distribución, de manufacturación, de manipulación de equipos que contengan materiales peligrosos, etc. Estas industrias, al aprovechar el conocimiento generado a partir de estas inversiones, aumentan la competitividad de sus productos en el mercado internacional, lo que facilita su venta comercial, generando así un beneficio económico, además de empleo de calidad en el proceso.
NeuroArm, IGAR, o KidsArm son un ejemplo de la aplicabilidad que se acaba encontrando en otros campos a la tecnología desarrollada para uso espacial. Lo expuesto constituye una pequeña muestra de la conexión tecnológica que existe entre distintos campos de actividad, y también constituye una muestra de la importancia en reconocer el beneficio para la sociedad en su conjunto que se obtiene a partir de la inversión en el desarrollo de tecnología en diversos sectores industriales, incluido el espacial.
Se espera que este robot llegue a Jupiter en julio de 2016. Esta programado para ejecutar maniobras a millones de kilometros de distancia de la Tierra. Tiene nueve instrumentos cientificos.