

El motor de descenso del módulo lunar fue marginalmente estable en los Apolo 11 y 12 .
En una entrada que se publicó el año pasado por estas fechas hablé acerca de los imprevistos que tuvieron que ser sorteados por Armstrong y Aldrin, y por el equipo de control en Houston durante el descenso a la superficie de la Luna del módulo lunar Eagle, cuyo 48 aniversario tuvo lugar este 20 de julio. En especial, la aparición de varias alarmas a bordo y un error en la navegación durante el descenso complicaron una fase de vuelo que se acometía por primera vez en la historia y que era ya, de por sí, la más crítica y difícil de la misión Apolo 11. Sin embargo, hay un aspecto poco conocido del descenso propulsado relacionado con el control del motor de descenso del módulo lunar que estuvo muy cerca de haber supuesto un grave problema para la tripulación e incluso de haber requerido abortar el descenso.
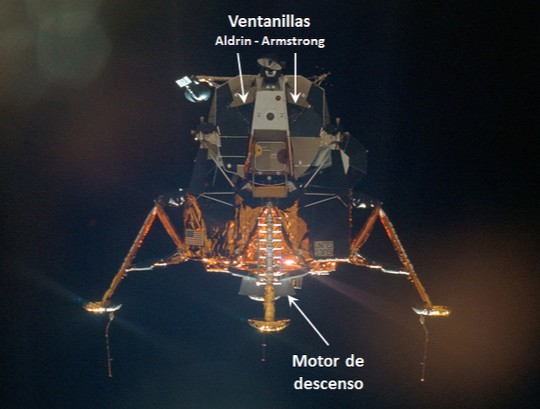
Motor de descenso en un módulo lunar.
El inicio del descenso propulsado (PDI, Powered Descent Initiation) a la superficie lunar se produjo a unos 460 km de distancia del lugar planeado de alunizaje y a unos 15 km de altitud. Este era el perilunio de una órbita de descenso en la que el módulo lunar se había insertado media revolución orbital antes mediante la maniobra DOI (Descent Orbit Insertion), un corto encendido de su motor de descenso que se produjo en la órbita original (llamada de aparcamiento) de unos 110 km de altura, en la que permanecería el módulo de mando y servicio pilotado por Michael Collins. Con el PDI se produjo de nuevo la ignición del motor de descenso, que ya no se apagaría durante los 12 minutos y medio siguientes hasta que el módulo lunar estuviera posado sobre la superficie.
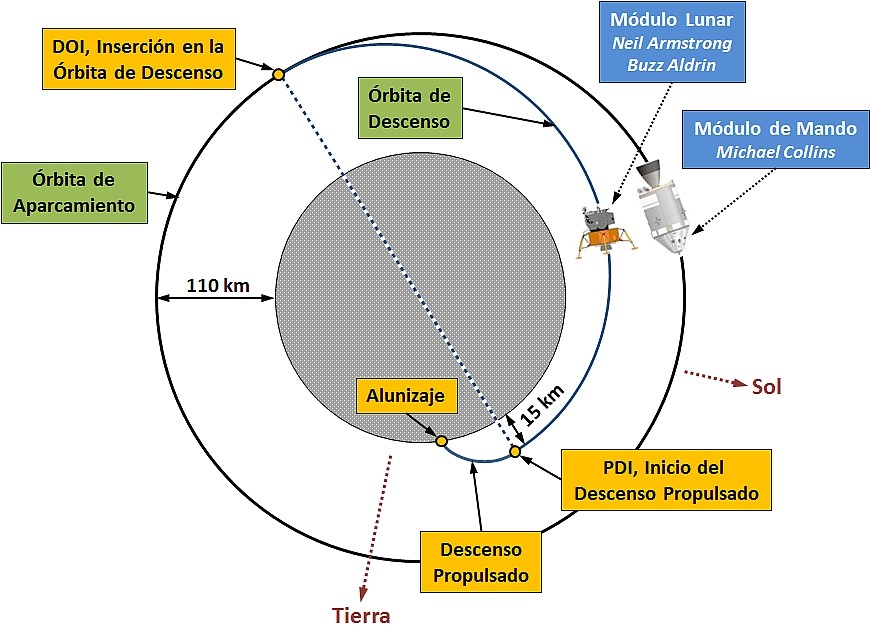
Esquema del descenso a la superficie lunar desde la órbita de aparcamiento. Autor: Eduardo García Llama.
Para poder conseguir volar la fase de descenso propulsado, el motor de descenso del módulo lunar debía ofrecer unas prestaciones muy específicas, entre ellas que su empuje fuera variable para acomodar las distintas subfases del vuelo dentro de esta fase, para responder adecuadamente a la reducción de la masa del módulo lunar según se consumía su combustible y para poder responder a los comandos de cambio de orientación y de velocidad de descenso propiciados por Armstrong durante el control manual en los últimos minutos del vuelo hasta posar la nave, capacidades que requerían de complejos algoritmos de software de control y guiado en la computadora de a bordo que debían estar adecuadamente conjugados con los sistemas de navegación, propulsión y de comando desde la cabina.
Uno de los elementos de diseño tiene que ver con el tiempo que transcurre entre el momento que un comando es emitido para cambiar el empuje del motor hasta que este empuje es, en efecto, cambiado. Ninguna respuesta a un comando se produce de forma instantánea ya que la señal eléctrica tarda un tiempo en alcanzar diversos equipos, los elementos mecánicos como las válvulas que regulan el paso de combustible tardan un tiempo en actuar, etc. Estos tiempos tienen que ser compensados en el algoritmo de control que reside en la computadora para que la operación del motor sea segura ya que, de otra forma, éste podría ser inestable, esto es, el valor del empuje podría comenzar a oscilar con amplitud cada vez mayor hasta ser incontrolable.
La tarea de compensar este retraso en el algoritmo de control recayó en Don Eyles, un joven ingeniero del Instituto Tecnológico de Massachusetts y uno de los programadores de la computadora del módulo lunar. La documentación relativa al motor de descenso de este módulo indicaba que ese retraso era de 0,3 segundos; sin embargo, Don Eyles, después de probar con varios niveles de compensación en el software, decidió establecerlo para un retraso de 0,2 segundos ya que con ese nivel observó que las oscilaciones desaparecían en simulaciones que reproducían el comportamiento del motor. Podría haber utilizado un nivel de compensación para los 0,3 segundos establecidos pero, a la hora de tener en cuenta otros factores de diseño, optó por no dar al sistema de control más de lo que parecía necesitar y evitar así que pudiera incurrir en alguna posible sobrecompensación imprevista.
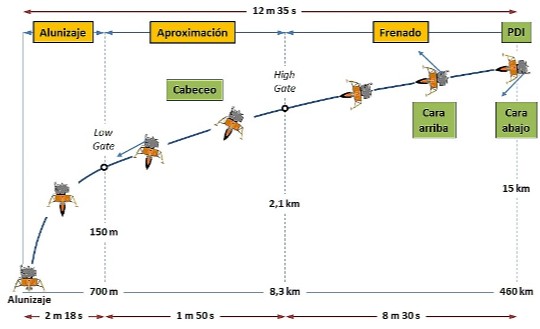
Esquema de la fase de descenso propulsado. Autor: Eduardo García Llama.
Aunque importante para las tres subfases en las que se dividía la fase de descenso propulsado (frenado, aproximación y alunizaje), cada una con sus lógicas de guiado y control propias, el efecto de la compensación era especialmente relevante para la última de ellas, la de alunizaje, en la que el comandante volaba el módulo lunar de forma manual, sometiéndolo a constantes cambios de orientación y a ajustes de la velocidad de descenso en su búsqueda del lugar propicio para posar la nave.
Tras el vuelo del Apolo 12, Clint Tillman, de Grumman Aerospace, la empresa que construyó los módulos lunares, advirtió oscilaciones de un 5% en el empuje del motor durante simulaciones que realizó de la fase de alunizaje en las que se usaban equipos reales y no modelos de software que reprodujeran el comportamiento de los equipos. La oscilación era pequeña, pero Tillman entendió que ésta no debía estar presente. Su indagación del problema lo llevó a revisar la telemetría que enviaron las misiones Apolo 11 y 12 y lo que descubrió no lo dejó impasible: en ambos casos, la amplitud de las oscilaciones en el empuje del motor en la fase de alunizaje eran de hasta un 25% alrededor del valor comandado.
Los datos apuntaban a una fuente de inestabilidad en el sistema que no había sido detectada hasta entonces. Una de las causas fue atribuida al hecho de que el sensor que medía la aceleración de la nave en los tres ejes estaba colocado lateralmente a algo más de un metro del centro de masa de la nave, con lo que variaciones en el cabeceo del módulo lunar podían ser interpretados como cambios de velocidad vertical; sin embargo, este efecto no podía explicar oscilaciones tan altas.
La respuesta al dilema tuvo un origen mucho más sencillo aunque nada tranquilizador. El diseño del módulo lunar y de sus sistemas se veía constantemente perfeccionado y evolucionaba dentro del programa Apolo según se identificaban áreas o aspectos que pudieran ser mejorados. Cuando Don Eyles recibió en su día la documentación del motor de descenso, éste ya había experimentado considerables mejoras en su diseño, siendo una de ellas que el tiempo de retraso ya no era de 0,3 segundos sino de 0,075 segundos, un cambio que no fue actualizado en la documentación.
Esto quiere decir que, dado que Don Eyles programó el software de vuelo con un nivel de compensación para 0,2 segundos de retraso, y dado que el retraso era de 0,075 segundos, el sistema de control del empuje del motor de descenso voló, de hecho, sobrecompensado y de forma marginalmente estable tanto en el Apolo 11 como en el Apolo 12, lo que explica las oscilaciones del 25% que se descubrieron en la telemetría, lo que nos lleva a plantearnos qué habría sucedido si Don Eyles hubiera programado un nivel de compensación para el retraso de 0,3 segundos que estaba documentado en lugar de para los 0,2 segundos que prudentemente juzgó necesario.
La respuesta resulta ser turbadora ya que los análisis realizados posteriormente demostraron que, de haber sido este el caso, el sistema habría sido inestable ante una mínima excitación. La amplitud de las oscilaciones, pequeñas o grandes, en lugar de disminuir o de mantenerse constantes, habrían crecido rápidamente hasta el punto de que es altamente probable que el descenso se habría tenido que ver abortado en pleno vuelo, esto es, desde luego, en el mejor de los casos.
Bien por toda esta información. Gracias.